

 联系我们
联系我们

在设置碰撞检测功能首先需要设置手爪负载和安装在机器人上的设备的信息。因为此功能需要使用安装在机器人上设备负荷的信息来检测碰撞。
按“MENU—设置—碰撞检测”
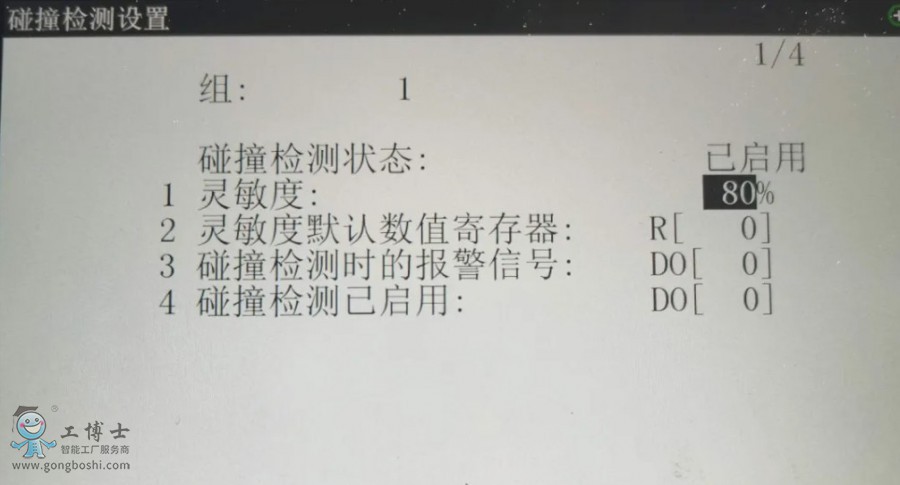
碰撞检测状态:设置为启用为碰撞检测有效。
灵敏度:设置范围为1%~200%,默认设置为100%,百分比的数值越大表示碰撞检测越灵敏,在需要提高碰撞检测灵敏度时增大百分比值。在需要减少错误的报警时减少此百分比值。值越小,反应越迟钝。值越大,反应越敏感。
灵敏度默认数字寄存器:通过寄存器指定灵敏度值,配合COL GUARD ADJUST指令使用。不使用COL GUARD ADJUST指令时,设定为0。
碰撞检测时的报警信号:使用数字量输出DO显示是否发生了碰撞检测报警。DO0为不使用。
碰撞检测已启用:使用一个数字量输出DO 来显示碰撞检测是否开启。DO0为不使用。
注意事项:如果设置碰撞检测灵敏度的百分比值小于100%,那么碰撞检测功能将会不能正常有效工作。如果机器人不断吸收碰撞力,机器人的使用寿命将会减少。
在程序中使用碰撞检测指令COL DETECT ON 和 COL DETECT OFF 来设置碰撞检测的开启和关闭。如下图所示:
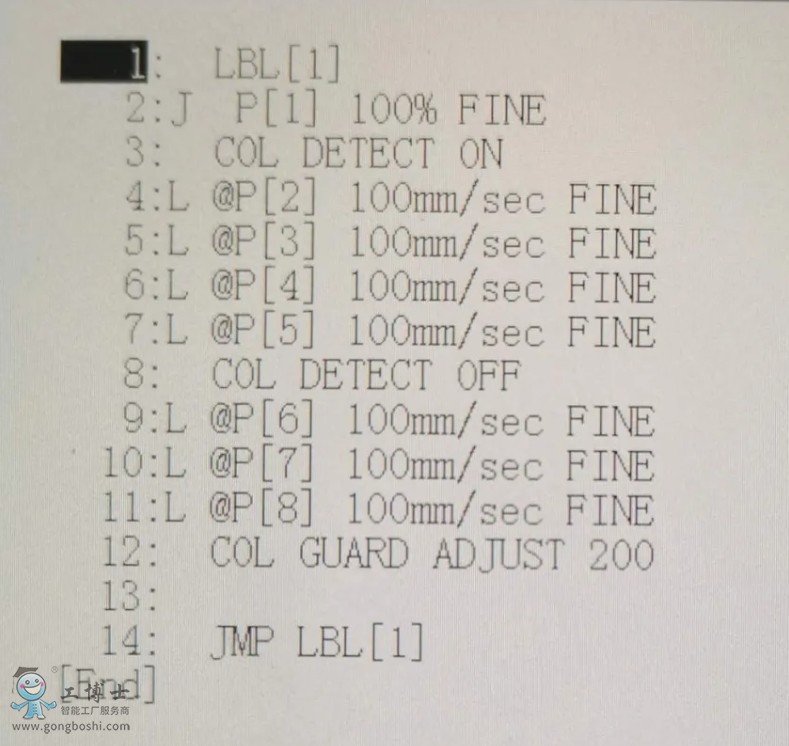
从第3行至第7行程序碰撞检测开启,可以检测碰撞。第8行至第11行碰撞检测关闭,不检测碰撞。执行第12行后,碰撞检测灵敏度值变成了200%。
使用COL DETECT ADJUST (碰撞检测灵敏度)指令,通过这个指令,可以在程序执行的过程中改变碰撞检测的灵敏度。
更多资讯:发那科机器人